
Miniaturgreifer mit opto-thermo-mechanischem Antrieb
Abstract
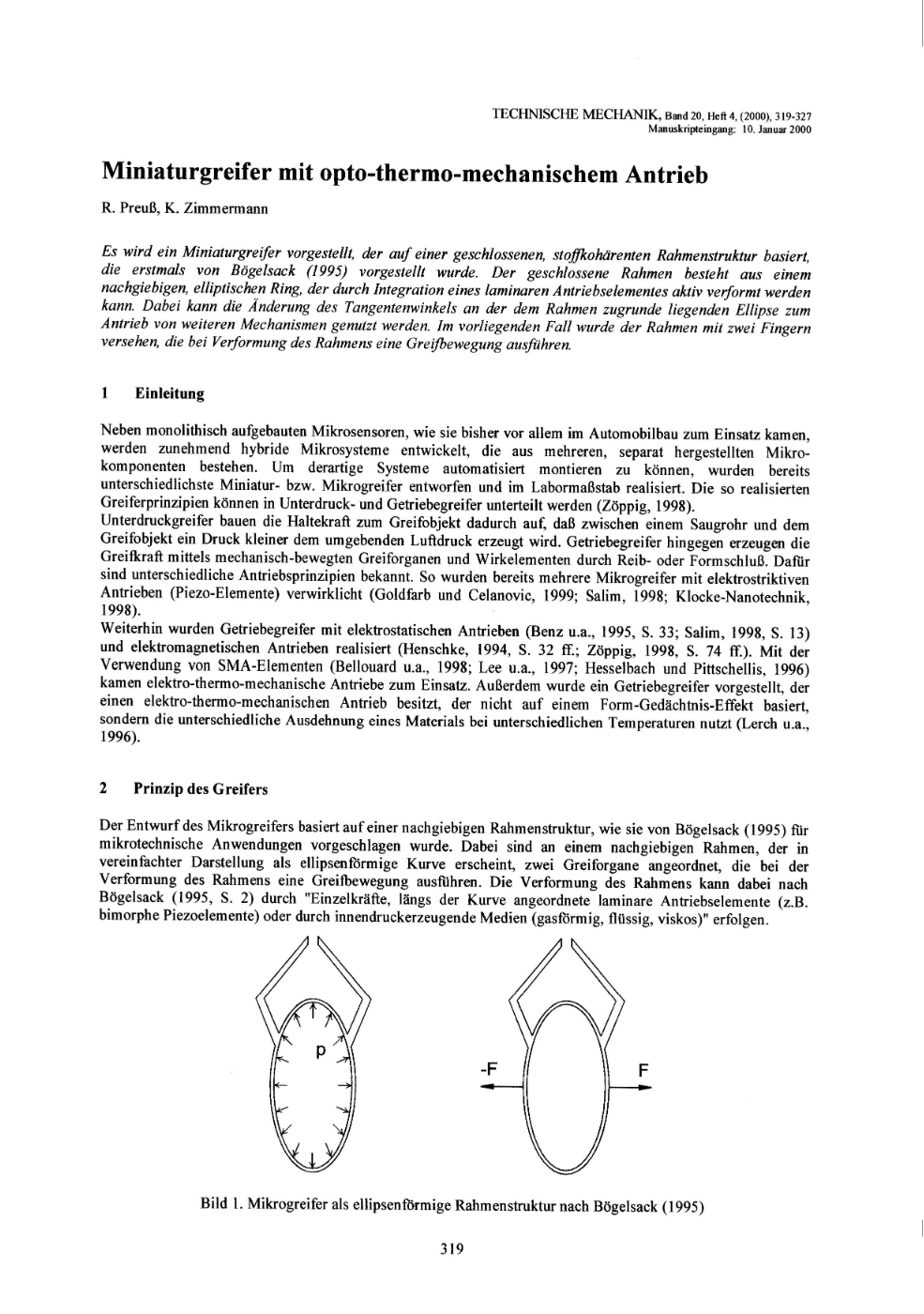
Es wird ein Miniaturgreifer vorgestellt, der auf einer geschlossenen, stoffkohärenten Rahmenstruktur basiert, die erstmals von Bögelsack (1995) vorgestellt wurde. Der geschlossene Rahmen besteht aus einem nachgiebigen, elliptischen Ring, der durch Integration eines laminaren Antriebselementes aktiv verformt werden kann. Dabei kann die Änderung des Tangentenwinkels an der dem Rahmen zugrunde liegenden Ellipse zum Antrieb von weiteren Mechanismen genutzt werden. Im vorliegenden Fall wurde der Rahmen mit zwei Fingern versehen, die bei Verformung des Rahmens eine Greifbewegung ausführen.
Downloads
Published
2019-10-10
How to Cite
Preuß, R. and Zimmermann, K. (2019) “Miniaturgreifer mit opto-thermo-mechanischem Antrieb”, Technische Mechanik - European Journal of Engineering Mechanics, 20(4), pp. 319–327. Available at: https://journals.ub.ovgu.de/index.php/techmech/article/view/1101 (Accessed: 19 July 2026).
Issue
Section
Article

